…фото и видео:
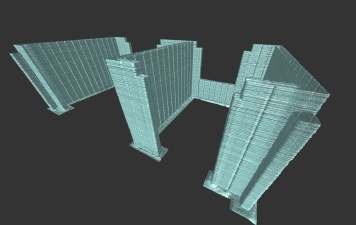
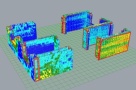
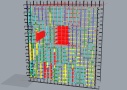
Лазерное сканирование объекта
Автономный роботизированный комплекс для кирпичной кладки: Лазерное сканирование, анализ объекта, посторенного из кирпичных блоков с помощью робота KUKA и сравнение реальности с проектом
DEKMATIC - Робот для кирпичной кладки
Автономный роботизированный комплекс для кладки кирпичей и кирпичных блоков


Проверка прототипа оборудования
Робот для укладки кирпичей: проверка прототипа оборудования

Первые тесты прототипа оборудования
Робот-каменщик: первые тесты оборудования в лаборатории


Роботизированная пила
Роботизированный комплекс для резки стандартных кирпичных элементов.


Моделирование сложных объектов из бетона: подставка под лампу
Моделирование и визуализация объектов в программе симулирования Rhino 6.0, симуляция и анимация изготовления формы опалубки в SW Grasshopper, моделирование и программирование движений робота (Grasshopper + KUKA|prc), изготовление опалубки из пенопласта с помощью метода разрезки материала горячей проволокой, финальная обработка и бетонирование объекта.


Роботизированое изготовление картин в большом формате
Дизайн картин, моделирование и визуализация в SW Rhino 6.0, трассировка движения робота, векторизация и оптимальная трасса, моделирование и программирование движений робота (Grasshopper + KUKA|prc), изготовление картин на большом формате, финальная обработка картин.


Моделирование сложных элементов из бетона
Моделирование и изготовление сложных объектов архитектуры из бетона с помощью промышленных роботов.


Инновация лаборатории для поддержки программы аспирантуры
Разработка и изготовления высоко технологичных элементов для роботизированного строительного производства: роботическая пила, вакуумная присоска для строительных элементов, автоматическая подача раствора. Разработка процессов роботической укладки кирпичей для заданной структуры и размеров.


Оборудование и реконструкция лаборатории Роботизации Строительных Процессов
Установка робота, установка элементов безопасности (датчики, сенсоры, элементы отключения электро питания, аптечка и огнетушитель). Разработка и изготовление системы электро питания, обработки сигналов (Beckhoff модули), установка складских стеллажей, рабочих столов, дрели и другого оборудования и инструментов.


День открытых дверей 25.-26.01.2019
Узнайте чем дышит строительный факультет. Разведайте обстановку на кафедрах геодезии, архитектуры и конструкции строительства. Загляните внутрь лабораторий, лекционных залов, пожмите руку роботу-строителю.


День открытых дверей 23.-24.11.2018
В течении двух дней Вам будут представлены все части строительного факультета вформе лекций, презентаций, ознакомительных стендов. Преподователи и студенты помогут Вам соориентироваться в широком предложении разных специальностей от разных кафедер. Пожмите руку роботу-строителю


Моделирование роботической системы для укладки кирпичей
Цель проекта - создание робота для укладки кирпичей в уменьшенном масштабе. В течение проекта будут подробно описаны основных технологические процессы роботизированного строительства кирпичных объектов: конвертирование чертежей в среду промышленных роботов, перемещение и контроль позиции отдельных строительных элементов, разрезка кирпичей и их укладка на раствор.


Курсы повышения квалификации Beckhoff
Программирование и диагностика промышленных компьютеров в среде TwinCAT 3 по норме IEC 61131-3. Принципы онлайн программирования и контроля процессов (PLC программирование).


Различные эксперименты с использованием роботов
Обработка входящих и выходящих сигналов, установка и опробирование сензоров (ультразвук и лазер). Разработка и производство вакуумной системы для перемещения строительных элементов. Установка элементов безопасности труда. Различные попытки: кирпичная кладка, покраска стен, обработка изображения.


Курсы повышения квалификации по программированию роботов KUKA 2.0
В 2017 один сотрудник лаборатории успешно закончил курсы углубленного программирования промышленных роботов KUKA в среде KRC4.


Функциональная модель робота для покраски стен
В 2015 годы мы продолжили развивать нашу идею создания многофункционального строительного робота. Был спроектирован и создан робот для покрасочных работ. Движения робота по оптимальной трассе покраски выполнялась согласно специально разработанному алгоритму. Модель робота для покрасочных работ была выполнена в уменьшенном масштабе.


Робот KUKA Agilus
В 2016 году нам удалось приобести нашего первого любимого питомца :) KUKA Agilus KR10 R1100 sixx с привлечение нескольких источников финансирования. В то время лаборатория располагалась в Чешском Техническом Университете в Праге, Строительный факультет, комната B584.


Курсы повышения квалификации по программированию роботов KUKA
Два сотрудника нашей лаборатории успешно закончили базовый курс подготовки программистов промышленных роботов KUKA в среде программирования KRC4.
Строительный робот LEGO
Первая конструкция робота была создана на базе конструктора LEGO MindStorm, который смог выполнить укладку маленьких кирпичиков LEGO в кирпичной кладке.


|
|
Чешский Технический Университет в Праге, Строительный факультет Кафедра технологии строительства B482 - Лаборатория роботизации строительных процессов Контакт: vjaceslav.usmanov@cvut.cz |
|

|
|
RoboStav.cz Лаборатория Роботизации Строительных Процессов |