…projekty:
…2019-2021:
TH04010329 - Autonomní robotický stavební systém (TAČR - Technologická agentura České republiky)
Hlavním cílem projektu je vývoj funkčního prototypu autonomního robotického stavebního systému, který umožní provádět přesnou a rychlou stavební výrobu s redukovaným počtem stavebních pracovníků. Systém bude zaměřen na aditivní výrobu (nosné i nenosné stěny), přesné zdění na maltu (základy, nosné stěny a příčky), provádění zateplování a malby povrchů. Autonomní systém bude na základě objektové stavební dokumentace (BIM) provádět, za pomoci zabudovaného konvertoru, export stavebního modelu do rozhrání průmyslových robotů a následně provede stavební výrobu. Prototyp systému bude funkční do tří let od zahájení projektu. Modelové objekty budou zhotoveny v měřítku 1:1. Prostředky podpory budou použity na vývoj prototypu včetně HW a SW prvků a výrobu zkušebních vzorků.


…granty:
…2018-2019:
CZ.02.1.01/0.0/0.0/16_017/0002625 - Inovovaná laboratorní a zkušební infrastruktura pro doktorský studijní program Pozemní stavby (ČVUT v Praze, Fakulta stavební)
122.C | Dovybavení laboratoře pro robotizaci dokončovacích prací. Vývoj a výroba pracovního nástroje a vakuové přísavky pro zednické práce. Pracovní nástroj (grip) zajistí technologické procesy zdění: depaletizace – odebrání kusového prvku včetně zdícího prvku z místa dodávky (palety, balení atd.) a následné vycentrování cihly bude na překládacím stolu; zachycení, přemístění zdícího prvku v prostoru; usazení kusového prvku včetně zdícího prvku na přesnou pozici v konstrukci (podle zadaných souřadnic); nanášení malty/lepidla na zdící prvek (bude na výměnném greiferu); úprava tvaru a velikosti prvků přesným dělením (řezání, broušení). Řezy se budou provádět s odsáváním nečistot. Řezy se mohou provádět jak ve svislé, tak i ve skloněné od svislice pozice (do 45 stupňů).



…2017-2019:
SGS17/165/OHK1/3T/11 - Modelování průmyslového robotického zdicího systému (ČVUT v Praze, Fakulta stavební, K122)
Projekt bude věnován návrhu funkčního modelu zdícího robota. Výstupem projektu by měl být průmyslový robot, který bude schopen technicky zrealizovat kompletní proces zdění. Systém bude vytvořen ve zmenšeném měřítku a bude schopen vyzdít oblast objektu. Robotický systém zdění za pomocí speciálního vyvinutého software dokáže zkonvertovat potřebná data matematického modelu z prostředí BIM do formátu průmyslových robotů KUKA KRC4 a provést optimální návrh pohybů robotické ruky. Během projektu bude vyvinuto: funkční model robotického systému zdění včetně vývoje technologie (depaletizace, způsob řízení pohybů, řezání a lepení cihel na vazbu); SW pro migrací dat (IFC -> KRC4), technické zařízení (grip, nanášení malty/lepidla, řezání cihel, kontrolní zařízení); ovládací prvek včetně optimalizačních postupů (energie, čas, spotřeba materiálů).
stránky projektu...
…2015-2016:
SGS15/126/OHK1/2T/11 - Funkční model malířského robota (ČVUT v Praze, Fakulta stavební, K122)
Grantová práce byla věnována návrhu funkčního modelu malířského robota. Výstupem projektu byl robot, vytvořeny ve zmenšeném měřítku, který bul schopen za pomocí ovládací jednotky a speciálních počítačových programů vymalovat malou oblast zdi bílou barvou. Během projektu bylo vyvinuto: funkční robotická tryska na barvu, pohyblivá část (robotická ruka nebo robotický zvedací podvozek), ovládací prvek včetně optimalizačních postupů (energie, barva, čas).
stránky projektu...
…experimenty a další činnost:
…2019:
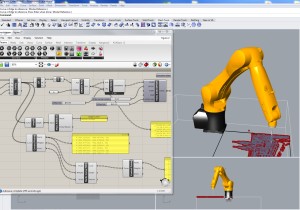
Experiment v.3.0 - Modelování architektonických prvků z betonu: Podstavec pro lampu (ČVUT v Praze, Fakulta stavební, K122 + EC)
Návrh a vizualizace obrazů v simulačním SW Rhino 6.0, simulace a animace výrobního procesu v Grasshopper, modelování a programování robotických pohybů (Grasshopper + KUKA|prc), výroba bednění z polystyrenu metodou RHWC, proces realizace bednění, jeho opracování a následná betonáž.



Experiment v.2.0 - Malířský robot a zpracování obrazů (ČVUT v Praze, Fakulta stavební, K122)
Návrh a vizualizace obrazů v simulačním SW Rhino 6.0, vektorizace a optimalizace pohybů rýsovací hlavy (vylepšená metoda obchodního cestujícího (rozdělení každého obrazu na 3600 obdélníků), zkrácení délky trasy na prázdno (Trace Off) z 300 m na 30,8 m), modelování a programování robotických pohybů (Grasshopper + KUKA|prc), výroba velkoplošných obrazů, finální zpracování a rámování.


Experiment v.1.0 - Modelování architektonických prvků z betonu (ČVUT v Praze, Fakulta stavební, K122)
Modelování a výroba složitých architektonických prvků z betonu při použití industriálních robotů.


Laboratoř RSP - Vybavení laboratoře pro robotizaci stavebních procesů (ČVUT v Praze, Fakulta stavební)
Montáž robota, instalace bezpečnostních prvků (lékárnička, přemístitelný hasičský přistroj, pokyny a informační tabule), montáž elektroinstalačních krabic a rozvaděčů včetně Beckhoff modulů, instalace skladovacích regálů a skříní, umístění dílenského stolu, stolní vrtačky a dalších podpůrných přístrojů a nástrojů.



Den otevřených dveří 25. - 26. 01. 2019 - Stavební robot a Robot Barman (ČVUT v Praze, Fakulta stavební)
Poznejte, jak stavárna dýchá. Zjistěte, co se skrývá pod stavařinou, architekturou a geodézií. Společně se podíváme do laboratoří, posedíme v posluchárně a popovídáme si se studenty a učiteli. Podáte si ruku s robotickým dělníkem, uvidíte studio membránové architektury.



…2018:
Den otevřených dveří 23. - 24. 11. 2018 - Stavební robot a Robot Barman (ČVUT v Praze, Fakulta stavební)
Po oba dny jsme pro Vás připravili program, který Vás provede od přijímaček po studium a výzkum. Na prezentacích zjistíte, které obory se na naší fakultě vyučují, jaký z nich si vybrat a jak se na přijímačky připravit. Podáte si ruku s robotickým dělníkem nebo zažijete na vlastní oči, jak vypadá požární experiment.



…2017-2018:
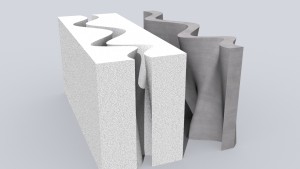
Smluvní výzkum - 3D tisk zkušebních vzorků (ČVUT v Praze, Fakulta stavební + DEK Atelier a.s.)
Modelování, programování, optimalizace robotických pohybů a výroba zkušebních vzorků stěn metodou aditivní výroby za pomoci robotické ruky KUKA Agilus.
|
|
ČVUT v Praze, Fakulta stavební, Katedra technologie staveb B482 - Laboratoř pro robotizaci stavebních procesů Kontakt: vjaceslav.usmanov@cvut.cz |
|

|
|
RoboStav.cz Laboratoř pro Robotizaci Stavebních Procesů |